roadmap
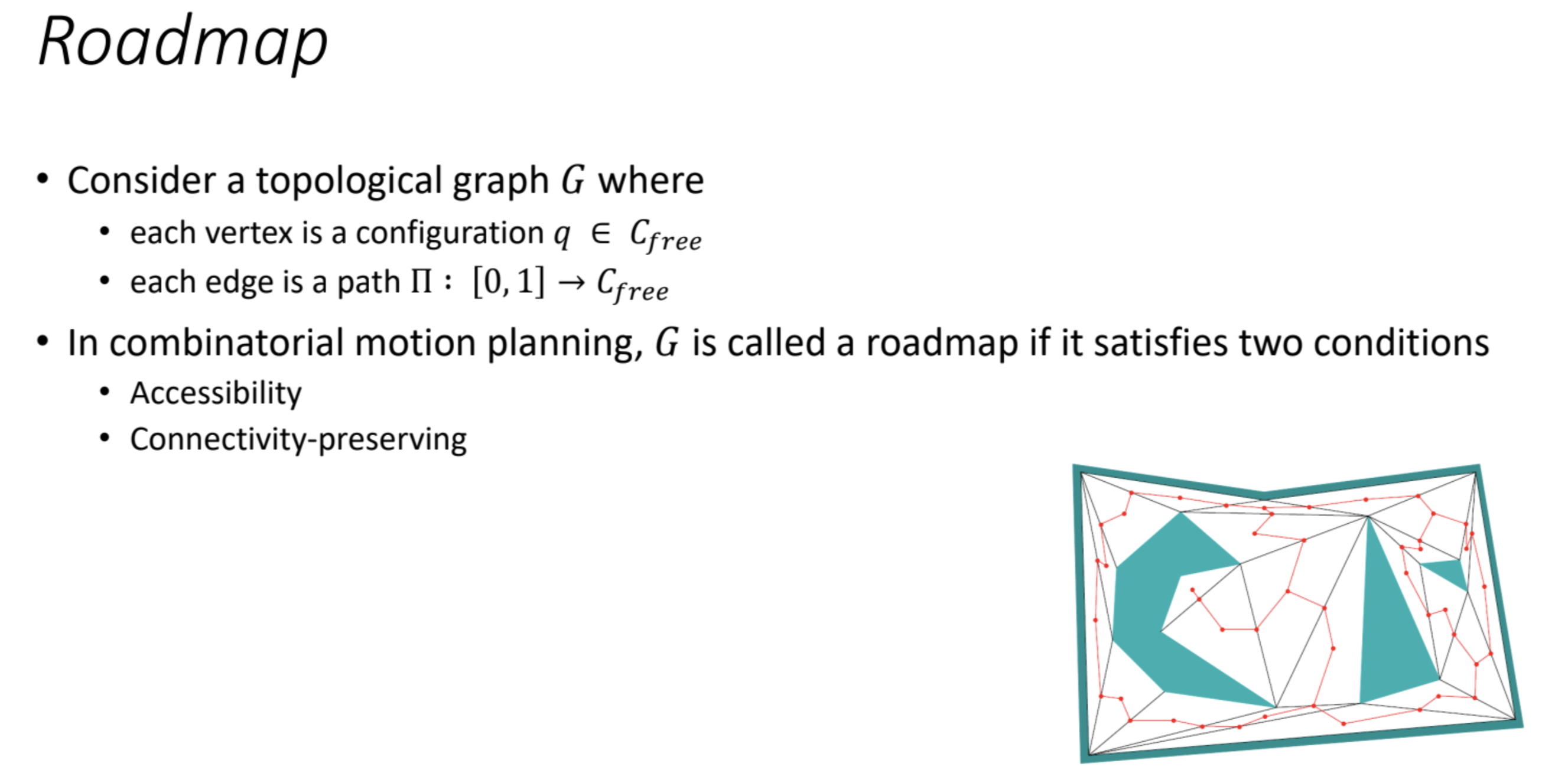
The slide you’ve provided discusses the concept of a "roadmap" in the context of combinatorial motion planning. Here’s an explanation of the key elements:
-
Topological Graph G:
- A graph $G$ is considered, where:
- Vertices represent different configurations $q$ that belong to a free configuration space, denoted as $C_{free}$.
- Edges represent paths $\Pi$ that connect these configurations. Each path is a function from the interval [0, 1] to $C_{free}$, meaning the path continuously maps the interval from the start to the end configuration.
- A graph $G$ is considered, where:
-
Conditions for a Roadmap:
In combinatorial motion planning, $G$ is termed a "roadmap" if it satisfies two main conditions:- Accessibility: The roadmap should allow for all configurations to be accessible, meaning you can navigate from one configuration to another within the configuration space.
- Connectivity-preserving: The roadmap must maintain connectivity, ensuring that the graph allows continuous paths between configurations without disconnections.
-
Graph Representation:
The image shows a graphical representation of a roadmap, where configurations are represented as vertices and paths as edges. The diagram illustrates how these paths are arranged and connected to form a topological graph in motion planning.
accessibility refers to the ability to reach or navigate between configurations in the free configuration space, denoted as $C_{\text{free}}$, using the roadmap graph $G$.
To break it down:
-
Configuration Space:
- A configuration space is a representation of all possible states (positions and orientations) that an object (e.g., a robot or a vehicle) can be in. $C_{\text{free}}$ specifically refers to the subset of that space where no obstacles exist—this is the "free" part of the space.
-
Graph Representation:
- The roadmap $G$ is a topological graph where each vertex represents a configuration in $C_{\text{free}}$, and each edge represents a continuous path between two configurations.
-
Accessibility in a Roadmap:
- A roadmap is said to be accessible if, for any configuration in $C_{\text{free}}$, there is a way to move to any other configuration using the paths represented by the edges in the graph. In other words, you should be able to find a path from any starting configuration to a target configuration by following the edges of the roadmap.
- This means that all configurations in $C_{\text{free}}$ should be "connected" in some way, either directly or indirectly, through paths that represent feasible motions between them.
Key Points of Accessibility:
- Path Availability: Every configuration must have a path that leads to other configurations, meaning there are no isolated vertices or unreachable areas in $C_{\text{free}}$.
- Connectivity: If a configuration is not accessible from another, it implies that some part of the space is disconnected, which would be a failure in the roadmap’s design.
visibility graph
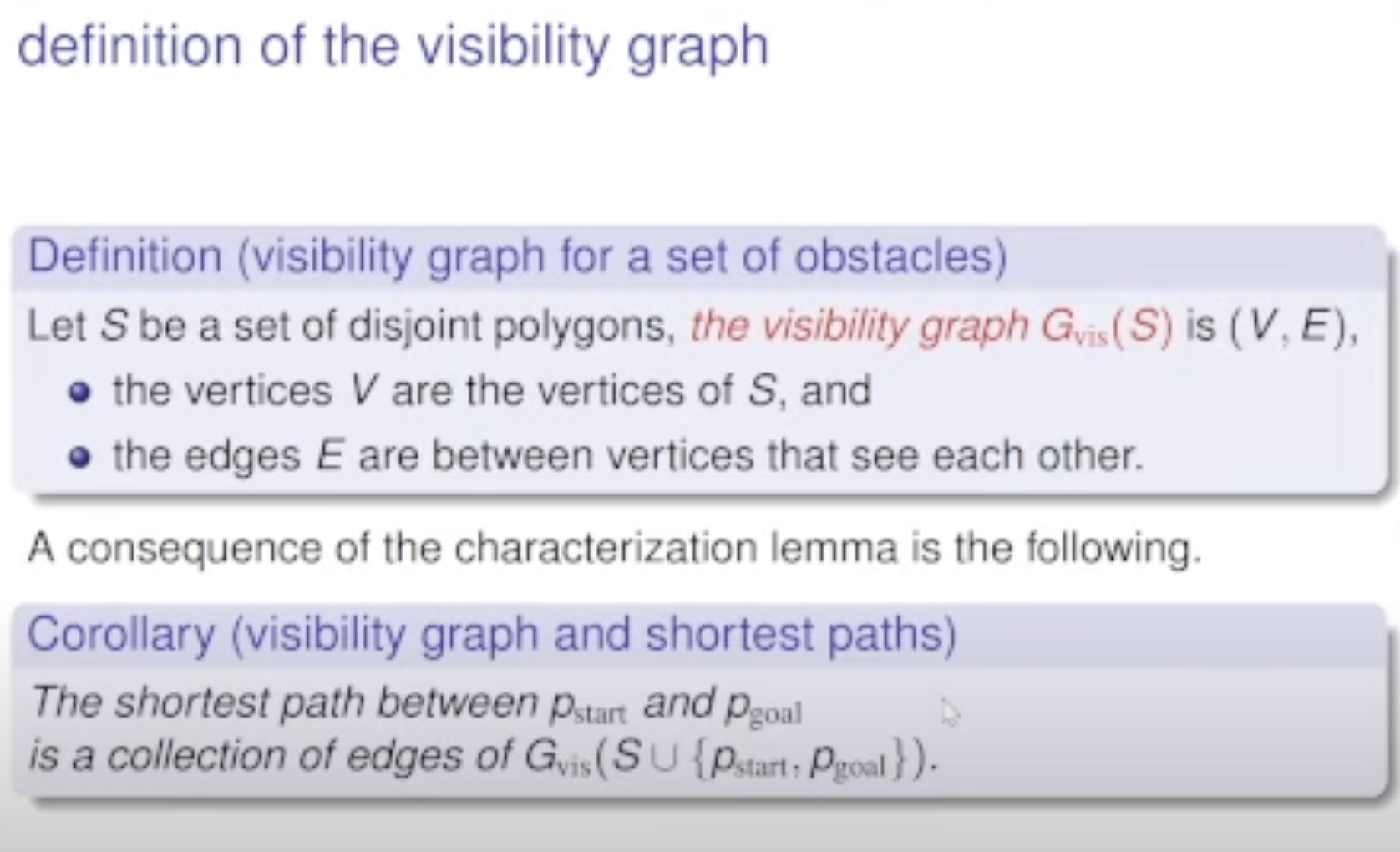
the pic above is not a visibility graph
one animations: https://www.youtube.com/watch?v=rs1t8LxjEW4
https://www.cs.cmu.edu/~motionplanning/lecture/Chap5-RoadMap-Methods_howie.pdf
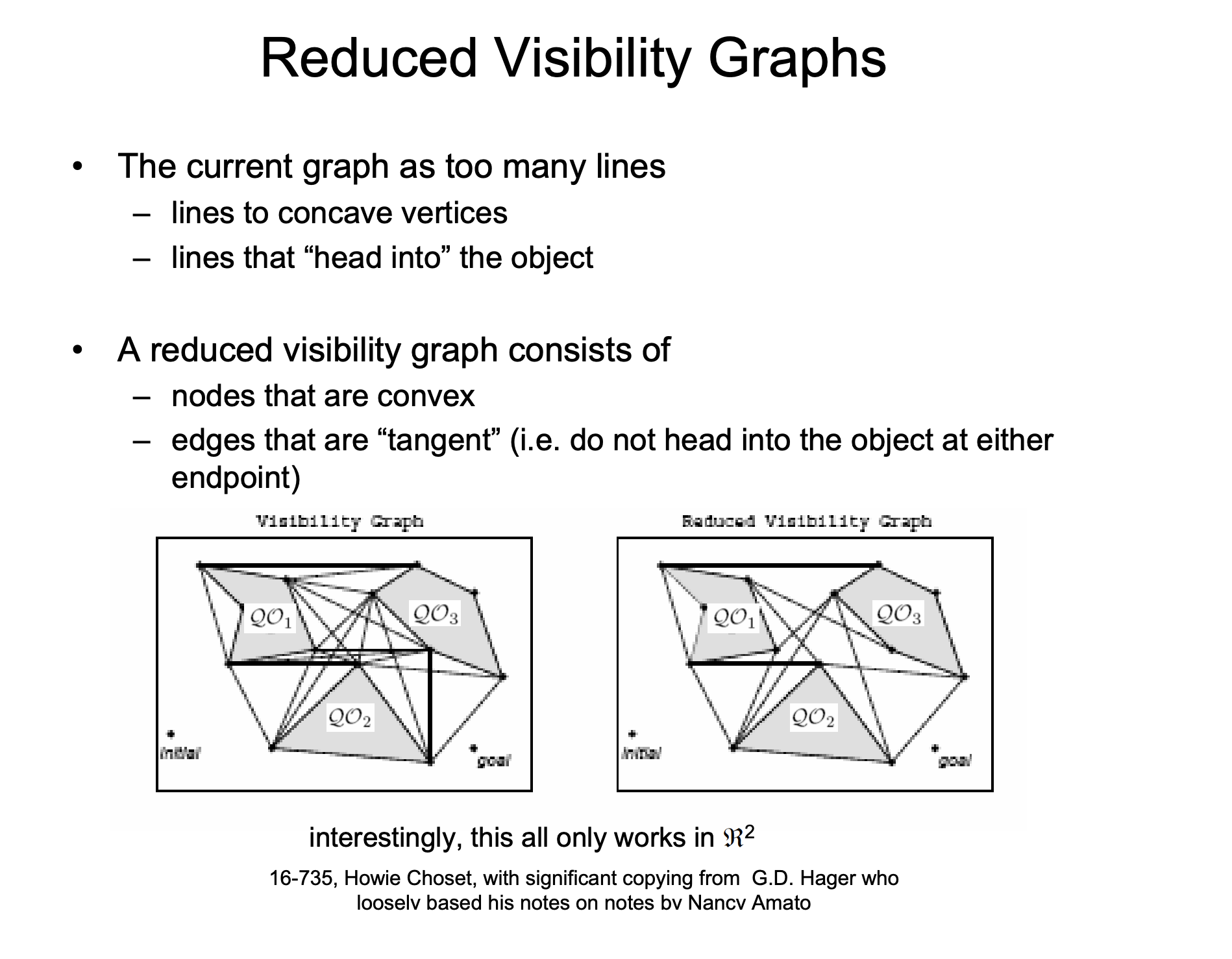
The current graph as too many lines
- lines to concave vertices
- lines that “head into” the object
A reduced visibility graph consists of
-
nodes that are convex
-
edges that are “tangent” (i.e. do not head into the object at either endpoint)
What does "convex" mean here? -
Convex vertices: In computational geometry, a convex vertex is a vertex of a polygon where the interior angle is less than 180° (e.g., corners of a rectangle or triangle).
-
Convex nodes: In the reduced visibility graph (RVG), nodes are placed at convex vertices of obstacles or critical points in the environment.
Why convex vertices? -
Convex vertices are “extreme points” that define the outer boundaries of obstacles.
-
Paths around obstacles often “hug” these convex vertices to avoid collisions.
-
Including only convex vertices reduces the number of nodes compared to a full visibility graph (which includes all obstacle vertices).
What does “tangent” mean here? -
An edge is tangent if it “grazes”(擦过) an obstacle at its endpoints (nodes) without entering the obstacle’s interior.
-
Visually, the edge touches the obstacle only at its endpoints (nodes) and does not intersect the obstacle’s boundary elsewhere.
Why tangent edges?
- Tangent edges ensure that the path stays collision-free while moving between nodes.
- They represent the shortest viable path around obstacles.
Example:
- Suppose two convex nodes (A and B) are on two different obstacles. A tangent edge connects A and B such that the line between them does not penetrate either obstacle.
Key Takeaways
- Nodes = Convex vertices of obstacles.
- Edges = Lines that “hug” obstacles at endpoints (tangent) and are collision-free.
- The RVG is a simplified but powerful tool for efficient path planning.
method 1 use shortest path to make RVG
1. Understand the Context
- What is a Reduced Visibility Graph?
- A Reduced Visibility Graph is a simplified version of a Visibility Graph, which is used in computational geometry and robotics for path planning.
- It represents the connections (edges) between points (vertices) in a space where obstacles are present, but with fewer edges than a full visibility graph to reduce complexity.
- Why is it used?
- It simplifies pathfinding by reducing the number of edges while still maintaining connectivity between critical points.
2. Steps to Create a Reduced Visibility Graph
Step 1: Define the Environment
- Represent the environment as a 2D or 3D space with obstacles.
- Obstacles are typically polygons (e.g., rectangles, triangles).
- Identify the start and goal points for pathfinding.
Step 2: Identify Key Points (Vertices)
- Include:
- All obstacle corners (vertices of polygons).
- Start and goal points.
- These points will serve as the vertices of the visibility graph.
Step 3: Construct the Full Visibility Graph
- For each pair of vertices, check if they are "visible" to each other:
- Draw a straight line between the two points.
- If the line does not intersect any obstacle, they are visible, and an edge is added to the graph.
- Repeat for all pairs of vertices.
Step 4: Reduce the Visibility Graph
- The goal is to remove unnecessary edges while preserving connectivity and the ability to find optimal paths.
- Common reduction techniques:
- Remove Redundant Edges:
- If multiple edges between two vertices are not part of the shortest path, remove them.
- Prune Non-Critical Edges:
- Remove edges that are not part of any shortest path between start and goal.
- Merge Parallel Edges:
- If two edges are nearly parallel and close to each other, merge them into a single edge.
- Use Convex Hulls:
- Simplify the graph by focusing on the convex hull of obstacles, ignoring internal edges.
- Remove Redundant Edges:
Step 5: Validate the Reduced Graph
- Ensure the reduced graph still contains all necessary paths:
- Check that the shortest path between the start and goal is preserved.
- Verify that no critical connections are lost.
3. Algorithms for Reduction
- Dijkstra’s Algorithm or A*:
- Use these algorithms to identify edges that are part of the shortest path and remove those that are not.
- Edge Pruning:
- Iterate through all edges and remove those that do not contribute to the shortest path.
- Convex Hull Simplification:
- Focus on the outer boundaries of obstacles to reduce complexity.
4. Example Workflow
- Input:
- A 2D environment with rectangular obstacles.
- Start point: (0, 0).
- Goal point: (10, 10).
- Steps:
- Identify all obstacle corners and add them as vertices.
- Construct the full visibility graph by connecting all visible pairs of vertices.
- Reduce the graph by removing edges that are not part of the shortest path from (0, 0) to (10, 10).
- Validate the reduced graph to ensure it still contains the optimal path.
way2 use the defininations
Steps to Build an RVG from a VG
(a) Remove Non-Convex Nodes
- Convex vertices are those where the interior angle of the obstacle is < 180°.
- Concave vertices (interior angle > 180°) are removed from the graph.
- Result: Only convex vertices remain as nodes.
(b) Remove Non-Tangent Edges
- For each edge in the VG between two convex nodes, check if it is tangent:
- The edge must not "head into" the obstacle at either endpoint.
- At each convex node, the edge should align with the obstacle’s boundary (i.e., follow the obstacle’s edge or graze it).
- Remove edges that fail this test.
3. Example Workflow
- Input: A VG with nodes at all obstacle vertices (convex and concave).
- Step 1: Delete all concave nodes (e.g., "indentations" in polygons).
- Step 2: For the remaining edges between convex nodes:
- Check if the edge is tangent to both obstacles at its endpoints.
- Remove edges that penetrate the obstacle’s interior at either endpoint.
- Output: An RVG with only convex nodes and tangent edges.
4. Tools for Verification
- Visualization: Plot the VG and RVG to confirm tangent edges and convex nodes.
- Collision Checking: Use geometric libraries (e.g., Shapely in Python) to verify edge tangency.
- Path Validation: Ensure shortest paths in the VG are preserved in the RVG.