pooling server
This image explains a Polling Server scheduling policy used in real-time systems, specifically in the context of fixed-priority scheduling.
1. Server Task Release:
- The server task $\tau_s$ is released periodically with a period $T_s$. This means the server is ready to perform work at regular intervals.
2. Handling Aperiodic Events:
- When the server is released, it handles any pending aperiodic events (tasks that do not have a fixed arrival time) by consuming a fixed amount of budget $C_s$. This budget determines how much time the server can work on handling these events.
3. Suspension Condition:
- The server suspends its execution until the end of the period in two cases:
- It has used up its budget: If the server has consumed all its allocated budget during the current period, it suspends until the next period.
- No aperiodic event is pending: If there are no aperiodic events left to process, the server will also suspend its operations.
4. Suspension Behavior:
-
Once the server suspends, it gives up its remaining budget. This means if the server hasn’t fully used its budget by the time it suspends, the unused portion is discarded.
-
Aperiodic jobs are queued: Aperiodic events that couldn’t be processed during the current period are queued and will be handled in the next period.
5. Replenishment of Budget:
- At the start of the next period, the server’s budget is fully replenished back to $C_s$, allowing the server to handle a new batch of aperiodic events if any are pending.
summary
- The polling server is simple and ensures that the server will either handle pending aperiodic events using its budget or suspend when no events are pending or when its budget is exhausted.
- After each period, the budget is replenished, and the server is ready for the next round of tasks.
Deferrable Server
A Deferrable Server is another type of real-time scheduling policy that shares some similarities with the Polling Server but has key differences in how tasks are handled. Let’s compare the Polling Server and Deferrable Server based on their behavior and features:
1. Task Release and Handling Aperiodic Events:
-
Polling Server: The server task $\tau_s$ is released periodically with period $T_s$, and it handles pending aperiodic events by consuming a fixed budget $C_s$. The server can process events only during its active period.
-
Deferrable Server: The server also has a periodic release with a fixed period. It handles aperiodic tasks in a similar way by consuming a budget $C_s$, but the key difference is that the deferrable server allows aperiodic tasks to be deferred until the server becomes idle (i.e., when no periodic task is running and the server has remaining budget). This means the server can defer its handling of aperiodic tasks until the system is not executing other critical tasks.
2. Suspension and Budget Replenishment:
-
Polling Server: The server suspends after handling aperiodic events when:
- It exhausts its budget.
- No aperiodic event is pending.
Once suspended, it gives up its remaining budget, and aperiodic jobs are queued until the next period. The server’s budget is replenished to $C_s$ at the start of the next period.
-
Deferrable Server: The deferrable server suspends when:
- It exhausts its budget, or
- It is not actively processing any aperiodic events.
However, the deferrable server does not give up its remaining budget immediately when suspending. Instead, it retains the remaining budget and continues to handle tasks in the next period as long as there are aperiodic events pending. In this way, the deferrable server can defer aperiodic events and keep its remaining budget for future tasks.
3. Handling of Pending Aperiodic Events:
-
Polling Server: Aperiodic events are queued at the end of the current period and only processed when the server becomes active again in the next period. The server does not keep any leftover budget between periods unless it was used up entirely in the previous period.
-
Deferrable Server: Aperiodic events can be deferred if the server still has remaining budget from the previous period. The server can hold onto the budget and handle pending aperiodic tasks later, even if that means waiting until the next period to begin handling them. This allows for more flexibility in processing aperiodic tasks without queuing them until the start of the next period.
4. Flexibility and Efficiency:
-
Polling Server: The polling server is simpler but less flexible. It doesn’t allow tasks to be deferred beyond a period, so aperiodic tasks that can’t be handled in the current period will have to wait until the next one, potentially leading to delays.
-
Deferrable Server: The deferrable server is more efficient and flexible in handling aperiodic tasks. It can handle aperiodic tasks more dynamically, retaining leftover budget and potentially reducing waiting times for aperiodic jobs. This is particularly useful in systems where aperiodic tasks are highly variable and might need to be processed as soon as possible.
5. Behavioral Example:
-
Polling Server: If an aperiodic task arrives just after the server’s budget is consumed, it will have to wait until the next period starts, regardless of whether the system is idle. In the next period, the server will begin handling the pending task.
-
Deferrable Server: If an aperiodic task arrives after the budget is consumed, but there is still time left before the server’s next task is scheduled, the server can defer processing the task until it has the budget available again, without waiting for the next period. This allows more responsiveness and less waiting time for aperiodic tasks.
Summary Table:
| Feature | Polling Server | Deferrable Server |
|---|---|---|
| Budget Handling | Budget is replenished at the start of each period and is reset when suspended | Remaining budget is retained and can be deferred |
| Aperiodic Task Handling | Aperiodic tasks are queued until the next period | Aperiodic tasks can be deferred and processed during idle times |
| Suspension Condition | Suspends when no aperiodic task is pending or when budget is exhausted | Suspends when no aperiodic tasks are pending, but retains budget for later |
| System Flexibility | Less flexible in handling aperiodic tasks, may cause delays | More flexible and efficient in handling aperiodic tasks |
| Efficient Handling of Aperiodic Tasks | Aperiodic tasks may have to wait until the next period | Aperiodic tasks can be handled as soon as budget is available |
Conclusion:
- Polling Server is simpler but less flexible, often leading to higher delays for aperiodic tasks.
- Deferrable Server offers more efficient handling of aperiodic tasks by allowing budget retention and deferred task processing, making it more suitable for systems where aperiodic tasks need to be handled dynamically and promptly.
EDF
Overview of EDF Scheduling
- Definition: EDF is a dynamic-priority and preemptive scheduling algorithm used to schedule tasks in real-time systems. This means that the priority of tasks can change over time based on their deadlines, and a running task can be interrupted (preempted) if a higher-priority task becomes available.
- Key Principle: The task with the earliest absolute deadline is given the highest priority and is scheduled to run first.
Key Characteristics
-
Uses Dynamic Priorities and Preemptive Scheduling:
- Unlike static priority scheduling (e.g., Rate Monotonic Scheduling), EDF assigns priorities dynamically based on the current deadlines of tasks.
- Preemptive scheduling allows a task with an earlier deadline to interrupt a currently running task.
-
Higher Priority to Task with Earlier Absolute Deadline:
- The term "absolute deadline" refers to the specific time by which a task must complete, as opposed to a relative deadline (which is an offset from the task’s release time).
- The task with the closest absolute deadline gets the highest priority.
-
EDF is Dynamic-Priority and Job-Level Fixed-Priority Scheduling:
- Dynamic-Priority: Priorities are not fixed at the start but are reassigned as new deadlines approach.
- Job-Level Fixed-Priority: Once a job (instance of a task) is released, its priority remains fixed until it completes or is preempted. The priority is based on its absolute deadline at the time of release.
- The handwritten note clarifies that EDF is not relative (i.e., it doesn’t use relative deadlines like some other algorithms) and emphasizes that the highest priority task runs first.
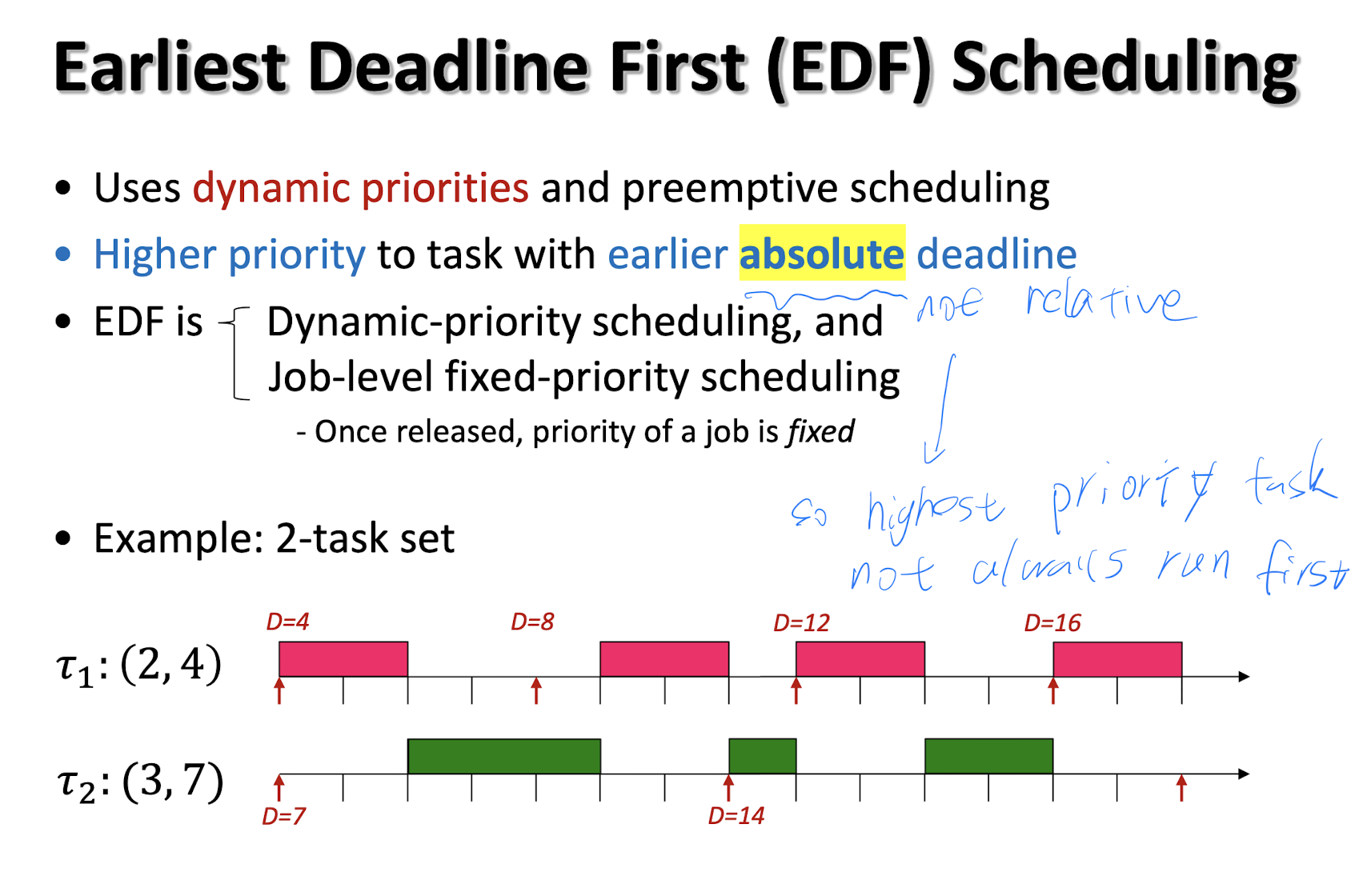
Example: 2-Task Set
The slide provides an example with two tasks, $\tau_1$ and (\tau_2), to illustrate how EDF works. Let’s analyze it:
-
Task Definitions:
- $\tau_1: (2, 4)$: This task has a computation time (or execution time) of 2 units and a period (or relative deadline) of 4 units. The absolute deadlines are marked at (D=4), (D=8), (D=12), and (D=16), indicating recurring instances of the task.
- (\tau_2: (3, 7)): This task has a computation time of 3 units and a period of 7 units. The absolute deadlines are marked at (D=7) and (D=14).
-
Timeline and Scheduling:
- The horizontal axis represents time, with arrows pointing to the deadlines ((D)) of each task instance.
- The pink bars represent the execution of (\tau_1), and the green bars represent the execution of (\tau_2).
- The lengths of the bars correspond to the computation times (2 units for (\tau_1), 3 units for (\tau_2)).
-
Scheduling Process:
- At (t=0), (\tau_1) (deadline (D=4)) starts because it has the earliest deadline.
- At (t=2), (\tau_1) completes, and (\tau_2) (deadline (D=7)) starts since it now has the earliest deadline.
- At (t=5), (\tau_2) is preempted because a new instance of (\tau_1) (deadline (D=8)) is released. (\tau_1) runs from (t=5) to (t=7).
- At (t=7), (\tau_1) completes, and (\tau_2) resumes (deadline (D=7) is already past, but the next instance with (D=14) takes over).
- This process continues, with tasks preempting each other based on the earliest absolute deadline.
-
Handwritten Notes:
- "So highest priority task not always run first" suggests that while EDF prioritizes based on deadlines, other factors (like task release times or preemption) might affect the exact order in complex scenarios.
- "Not always run first" might be a slight miscommunication; in pure EDF, the task with the earliest deadline should always run first unless preempted by an even earlier deadline.
Summary
EDF scheduling ensures that tasks are executed based on their absolute deadlines, making it efficient for real-time systems where meeting deadlines is critical. The example demonstrates how (\tau_1) and (\tau_2) alternate based on their deadlines, with preemption occurring when a task with an earlier deadline is released. This dynamic approach allows EDF to be optimal for single-processor systems, meaning it can schedule any task set that is theoretically schedulable, as long as the total utilization is less than or equal to 100%.
bin pack heruistics
Let’s dive into the slide about Bin-Packing Heuristics and break it down clearly.
What is Bin Packing?
Bin packing is a classic optimization problem in computer science and operations research. The goal is to pack a set of items (each with a specific size) into the fewest possible bins, where each bin has a fixed capacity (e.g., 1 unit). This problem has practical applications, such as optimizing storage, scheduling, or resource allocation, but finding the optimal solution is computationally challenging (it’s NP-hard). Heuristics are used to find good, if not always optimal, solutions efficiently.
Bin-Packing Heuristics Listed
The slide outlines several heuristic algorithms for bin packing. These methods differ in how they decide which bin to place an item into. Here’s an explanation of each:
-
Best-Fit Decreasing (BFD):
- Approach: Sort all items in decreasing order of size (largest to smallest) first. Then, for each item, place it into the most filled bin (the bin that will have the least remaining space after adding the item) where it fits. If no bin fits, start a new one.
- Rationale: By packing the largest items first and fitting them into the tightest possible space, this method aims to minimize wasted space and the number of bins.
-
Worst-Fit Decreasing (WFD):
- Approach: Similar to BFD, sort items in decreasing order. Then, place each item into the least filled bin (the bin with the most remaining space) where it fits. Open a new bin if necessary.
- Rationale: This method tries to balance the load across bins by keeping some bins less full, potentially leaving room for smaller items later.
-
First-Fit Decreasing (FFD):
- Approach: Sort items in decreasing order. Then, place each item into the first bin (in the order of bin creation) where it fits. If it doesn’t fit in any existing bin, start a new one.
- Rationale: This is a simpler approach that prioritizes the earliest available bin, which can be computationally efficient but may lead to more wasted space.
-
Best-Fit (BF):
- Approach: Without sorting items beforehand, place each item into the most filled bin where it fits. Open a new bin if needed.
- Rationale: This method focuses on minimizing the remaining space in each bin but doesn’t consider the order of items, which can lead to suboptimal packing.
-
Worst-Fit (WF):
- Approach: Without sorting, place each item into the least filled bin where it fits. Start a new bin if necessary.
- Rationale: Like WFD, this aims to balance bin usage but without the initial sorting step, which might not optimize the total number of bins as effectively.
-
First-Fit (FF):
- Approach: Without sorting, place each item into the first bin where it fits. Open a new bin if it doesn’t fit in any existing one.
- Rationale: This is the simplest heuristic, scanning bins in order, but it can result in more bins being used due to poor initial placement.
Key Questions to Ask
The slide ends with two important questions that guide the evaluation and application of these heuristics:
- How many bins do you need?
- This question focuses on the practical outcome of the heuristic: the total number of bins required to pack all items. Different heuristics will yield different numbers, and the goal is to minimize this count.
- Can you find the optimum number of bins?
- This question addresses the challenge of determining the theoretical minimum number of bins needed, which is the optimal solution. Heuristics like BFD and FFD are known to provide solutions within a factor of about 1.5 times the optimum (under certain conditions), but finding the exact optimum is computationally intensive and typically requires exhaustive search or advanced algorithms.
Summary
Bin-packing heuristics are practical strategies to approximate the solution to the bin-packing problem. The "decreasing" variants (BFD, WFD, FFD) sort items by size first, which often leads to better results, while the non-decreasing variants (BF, WF, FF) work with items in their given order. The choice of heuristic depends on the trade-off between computational efficiency and the quality of the packing (i.e., the number of bins used). The questions highlight the dual focus on practical implementation and theoretical optimality.
This scheduling technique is often used to optimize task execution in systems where tasks have periodic deadlines, and power efficiency or resource utilization is a concern. I’ll explain the concepts step-by-step, focusing on the key points from the slide and adding some context for clarity.
Title: Rate-Harmonizing Scheduling (RHS)
RHS is a scheduling approach that builds on the idea of Rate-Monotonic Scheduling (RMS), a popular real-time scheduling algorithm. RMS assigns priorities to tasks based on their periods (shorter period = higher priority) and assumes tasks are periodic and independent. RHS extends this by introducing a Harmonizing Base Period to better manage task execution, especially in systems where power consumption (e.g., entering/exiting sleep modes) or resource clustering is a concern.
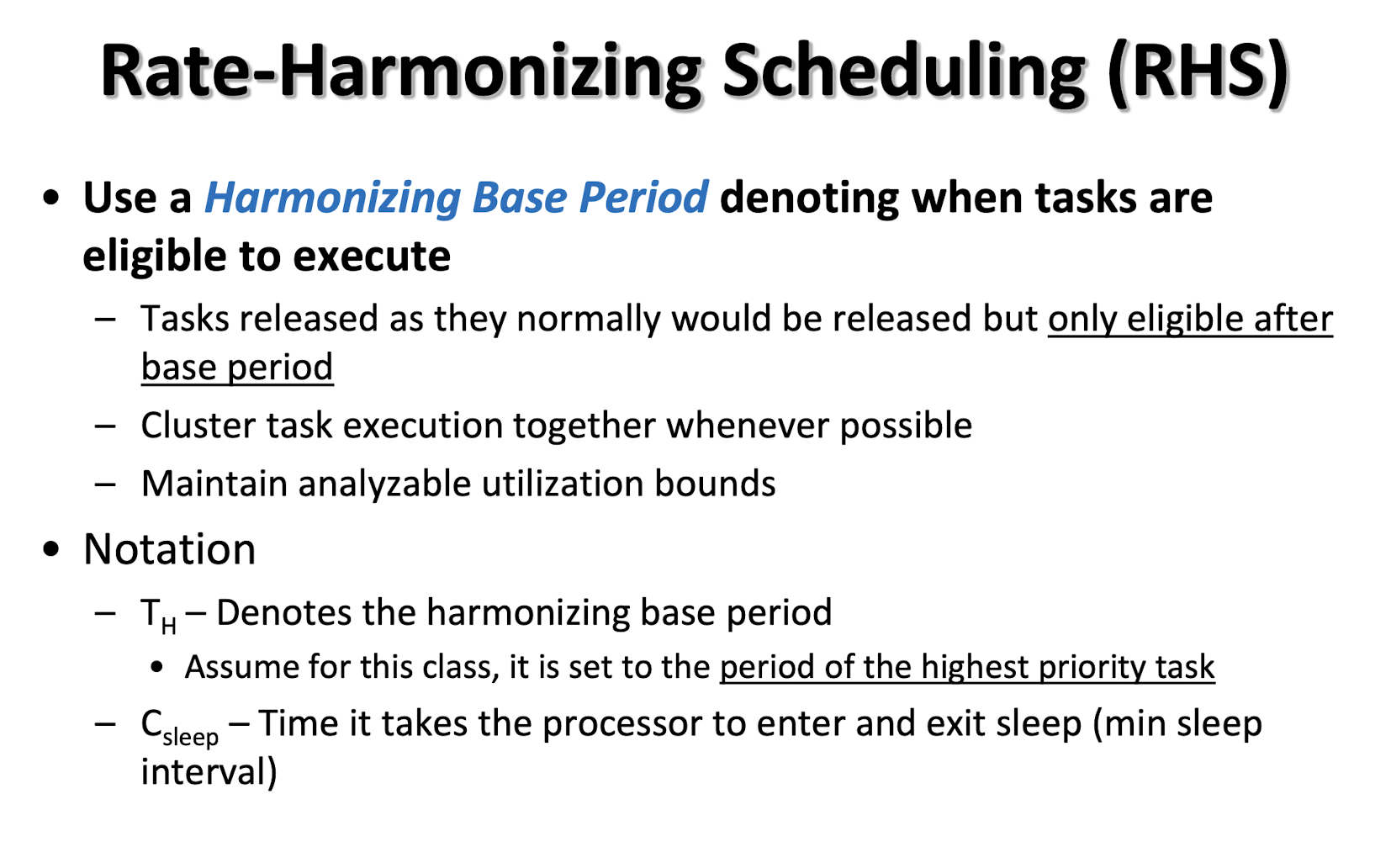
Key Concept: Use a Harmonizing Base Period
The Harmonizing Base Period (denoted ( T_H )) is a fundamental concept in RHS. Here’s what the slide highlights about its use:
-
Tasks are released as they normally would be, but only eligible after the base period:
- In a typical RMS setup, a task becomes eligible to run as soon as its period starts (i.e., at the beginning of its period). For example, if a task has a period of 10ms, it’s released every 10ms.
- In RHS, the Harmonizing Base Period ( T_H ) acts as a synchronization point. Tasks are still released according to their natural periods, but they can only execute after the nearest multiple of ( T_H ). This means tasks might be delayed slightly to align with ( T_H ).
- Why do this? By aligning task releases to multiples of ( T_H ), the system ensures that tasks are executed in a more predictable, synchronized manner, which can reduce the number of times the processor needs to wake up or switch contexts.
-
Cluster task execution together whenever possible:
- Instead of letting tasks run as soon as they’re released (which might lead to frequent context switches or wake-ups), RHS tries to "cluster" the execution of tasks. This means tasks are grouped to run together within the same ( T_H ) window.
- Why cluster? Clustering reduces the number of times the processor needs to transition between active and sleep states, which is especially important in embedded systems where entering/exiting sleep modes consumes power and time (denoted as ( C_{sleep} )). Fewer transitions = lower power consumption.
-
Maintain analyzable utilization bounds:
- RHS ensures that the system remains schedulable by maintaining utilization bounds similar to those in RMS. In RMS, the utilization bound for a set of tasks is ( n(2^{1/n} – 1) ), where ( n ) is the number of tasks. For a large number of tasks, this approaches approximately 69% (ln(2)).
- RHS modifies the release times of tasks, but it still ensures that deadlines are met and the system’s total utilization (the fraction of time the processor is busy) stays within a predictable, analyzable limit. This is crucial for guaranteeing that all tasks meet their deadlines in a real-time system.
Notation
The slide defines two key terms used in RHS:
-
( T_H ) – Denotes the Harmonizing Base Period:
- This is the time interval that serves as the "beat" or rhythm for task execution. All tasks align their execution eligibility to multiples of ( T_H ).
- Assumption for this class: ( T_H ) is set to the period of the highest priority task.
- In RMS, the highest priority task is the one with the shortest period. For example, if you have three tasks with periods 10ms, 20ms, and 50ms, the task with the 10ms period has the highest priority, so ( T_H = 10ms ).
- Setting ( T_H ) to the shortest period ensures that the highest priority task isn’t delayed too much, while lower priority tasks are adjusted to fit this rhythm.
-
( C_{sleep} ) – Time it takes the processor to enter and exit sleep (min sleep interval):
- This represents the overhead associated with power-saving modes in embedded systems. When a processor has no tasks to execute, it can enter a low-power "sleep" state to save energy.
- However, entering and exiting sleep takes time (and energy). ( C_{sleep} ) is the minimum time required for this transition.
- Why does this matter? If the processor wakes up too frequently (e.g., to execute a single task, then goes back to sleep), the overhead of ( C_{sleep} ) can outweigh the power savings. RHS minimizes these transitions by clustering task execution, ensuring that the processor stays active for a longer continuous period and sleeps for longer intervals.
Why RHS Matters in Real-Time Embedded Systems
Real-time embedded systems, like those in automotive control, medical devices, or IoT sensors, have strict timing requirements (deadlines) and often operate on battery power. RHS addresses two key challenges in such systems:
-
Meeting Deadlines:
- By maintaining analyzable utilization bounds and aligning task execution with ( T_H ), RHS ensures that tasks still meet their deadlines, even with the slight delays introduced by harmonization.
-
Power Efficiency:
- Embedded systems often need to minimize power consumption. Frequent wake-ups (due to scattered task execution) waste energy because of the ( C_{sleep} ) overhead. RHS reduces the number of wake-ups by clustering tasks, allowing the processor to sleep for longer periods.
Example to Illustrate RHS
Let’s consider a simple example with two tasks:
- Task 1: Period = 10ms, Execution Time = 2ms (highest priority)
- Task 2: Period = 15ms, Execution Time = 3ms
Without RHS (using RMS):
- Task 1 runs every 10ms (at 0, 10, 20, …).
- Task 2 runs every 15ms (at 0, 15, 30, …).
- The processor might execute Task 1 at t=0, then Task 2 at t=2, then sleep briefly, wake up at t=10 for Task 1, and so on. This leads to frequent wake-ups (every 5ms or so), incurring ( C_{sleep} ) overhead each time.
With RHS:
- Since Task 1 has the highest priority, ( T_H = 10ms ).
- Task 1 is released at t=0, 10, 20, … and can execute immediately since its period matches ( T_H ).
- Task 2 is released at t=0, 15, 30, … but can only execute at the nearest multiple of ( T_H ). So, at t=15, Task 2 waits until t=20 (the next multiple of ( T_H )) to become eligible.
- Now, at t=20, both Task 1 and Task 2 execute together (clustered). The processor stays active for a longer continuous period (executing both tasks), then sleeps until t=30. This reduces the number of wake-ups, saving power.
Summary
Rate-Harmonizing Scheduling (RHS) is a real-time scheduling technique that:
- Uses a Harmonizing Base Period (( T_H )) to synchronize task execution.
- Delays task eligibility to align with ( T_H ), clustering task execution to minimize processor wake-ups.
- Maintains schedulability by ensuring utilization bounds are analyzable.
- Reduces power consumption in embedded systems by minimizing the overhead of entering/exiting sleep modes (( C_{sleep} )).
In the context of your class, ( T_H ) is set to the period of the highest priority task, which simplifies the scheduling process while ensuring the most critical task isn’t delayed too much.
If you’d like a more detailed example with specific task sets or a diagram to visualize the scheduling, let me know, and I can help with that! I can also search for additional resources if you need more depth on RHS.